
AMR(Autonomous Mobile Robot)とは、近年、製造・物流分野で活用されている自律走行搬送ロボットです。主な特徴として、事前に設定された経路に依存せず、自律的に周囲の環境を認識し、最適な経路を選択して移動する点が挙げられます。次の章では、これまで工場や物流倉庫で広く用いられてきたAGV(Automated Guided Vehicle)との違いを通して、AMRが注目される背景を紹介していきます。
AMRと比較してAGVのほうが耳なじみのある方が多いと思います。AGVとは、鉄道のように事前に設定されたルートに沿って自動で移動する無人搬送車です。主に、磁気テープや誘導線、二次元コードなどのガイドを利用してルートを認識し、搬送作業を行います。表1に示したようにAGVは固定された経路における効率的な搬送に優れている一方で、AMRは動的に変化する環境での搬送に向いています。
表1 AGVとAMRの違い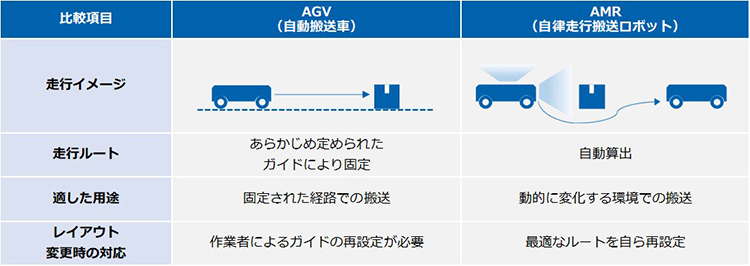
近年、工場や物流倉庫などでは、人口減少に伴う省人化に向け、人と機械・無人搬送車の協働が求められるようになりました。このため、固定の経路に依存することなく、作業空間のレイアウト変更や作業者および障害物に即座に対応できるAMRが注目されるようになったと言えます。
AMRの自律走行は、主に以下に挙げる機能によって実現されます。
これらの機能は、タスクを果たすことはもとより、安全な走行を実現する上でも重要となります。AMRの設計・開発にあたっては安全性の確保が不可欠であり、事故のリスクを最小限にすることが求められます。
AMRの安全性を確保するための規格として、ISO 3691-4「Industrial trucks — Safety requirements and verification — Part 4: Driverless industrial trucks and their systems」が発行されています。ISO 3691-4とは、無人搬送車や、それらを運行するシステムの安全性に関する要求事項や検証手段について規定した国際規格です。なお、当規格に対応するJIS規格として、JIS D 6802「無人搬送車及び無人搬送車システム-安全要求事項及び検証」があります。これらの規格に適合することにより、障害物検知や回避など適切な安全機能を備えることができ、事故の発生リスクを抑えることにつながります。
ISO 3691-4は、工場や倉庫などの産業領域で使用される無人搬送車を対象としています。無人搬送車には、AMRのほか、AGVや人が運転する産業車両を自動化したものが含まれます。
ISO 3691-4は、図1のような構成であり、主に以下3つのセクションに大別されます。
図1 ISO 3691-4の構成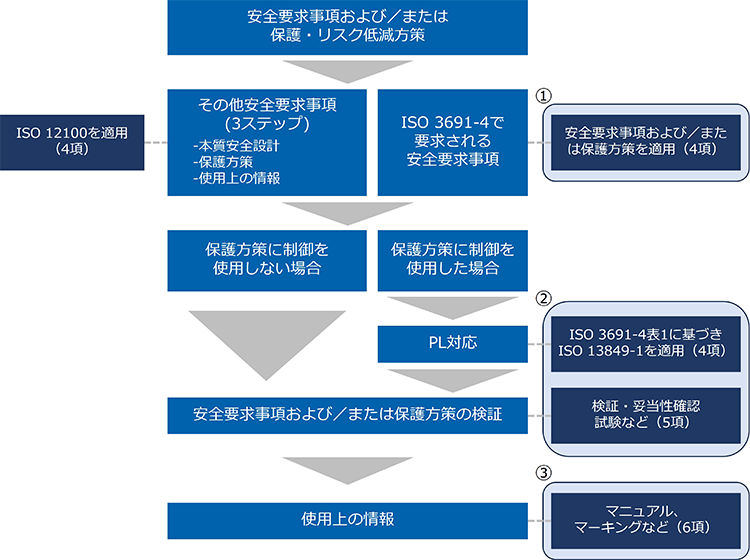
AMRの運用において設計者が考慮すべき要求事項を定めています。速度制御、安全停止機能、障害物検知機能などが対象です。また、ブレーキシステム制御や速度超過検知、人検出、警告システムなど、各安全機能については、機能安全を用いた実現、すなわち達成すべき安全要求レベル(パフォーマンスレベル)を規定しています。

AMRの技術は進化を続けており、今後もさらなる発展が期待されています。なかでも期待を寄せられているのが、マニピュレータおよびエンドエフェクタを備えたAMRです。マニピュレータおよびエンドエフェクタを搭載することで搬送作業だけでなく、物のピックアップや組立、検査など、複雑な作業も行えるようになります。AMRの活動領域が広がることにより、さまざまな産業における作業の自動化が予測されます。同時にAMRと人との関係がより複雑になるため、リスクアセスメントを通じて、危険事象の識別と適切な安全対策を検討することがますます重要となります。
当機構では、サービスロボットの安全評価・認証や、さまざまな装置に搭載される機能安全の評価・認証をはじめ、規格解説セミナーや規格要求事項に基づいたテクニカルミーティングのサービスを行っています。