
本記事では、機械の安全制御システムに関する要求事項を定めた国際規格であるISO 13849-1の基本的な考え方について、リスクアセスメント・パフォーマンスレベル・カテゴリという3つのキーワードを中心に紹介します。
製造業や物流業など、産業機械を扱う現場では、作業者の安全を守るための「機能安全」がますます重要視されています。
機能安全とは、簡単に言うと、信頼性の高い安全制御システムを用いることで、機械の安全性を高める考え方です。2014年に策定された生活支援ロボットの安全規格であるISO 13482においても機能安全に関する要件が定められており、その必要性は産業現場だけにとどまらず、私たちの生活空間にも拡がりをみせています。
国際規格であるISO 13849-1は、機械の制御システムにおける安全関連部(Safety-Related Parts of Control Systems:SRP/CS)の設計及び統合のための原則に関する要求事項及び指針を示すものであり、機能安全開発において重要な要求事項を規定しています。欧州における機械指令では整合規格にもなっており、グローバルに安全設計の基準として広く参照されます。
ISO 13849-1は、機械の安全機能が意図通りに動作し、故障時にも安全性を確保できるようにするための設計原則を定めています。なお、この規格は、用いられるテクノロジーおよびエネルギーの形式(電気、液圧、空圧、機械など)にかかわらず、すべての機械類に対して適用することができます。
機械の制御システムを設計する際の基本的な考え方として、機械の安全機能を構成する部分(SRP/CS)は通常動作を構成する部分(非安全関連部)と分離し、それぞれを独立させることが有効です。
機械類の安全機能を実現する装置としては、例えば以下のようなものがあります。
これらは、機械の安全状態を維持もしくは安全状態へ移行するために使用され、故障してもシステム全体の安全性が損なわれないように設計される必要があります。
機械類の安全設計においては、機械安全の基本規格ISO 12100に示される通り、リスクアセスメントを実施する必要があります。リスクアセスメントの結果、リスクが許容可能なレベルまで低減されていない場合、「3ステップメソッド」に基づいたリスク低減策の実施が求められます。
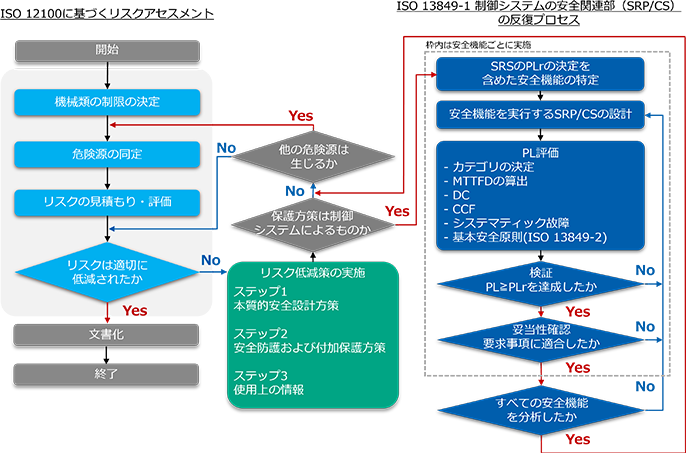 図 リスクアセスメントの流れ(出典ISO 13849-1:2023 図4をもとにJQA作成)
図 リスクアセスメントの流れ(出典ISO 13849-1:2023 図4をもとにJQA作成)
この3ステップのうち、ステップ2に該当する「制御システムを用いた安全防護策」や「制御システムを用いた付加保護方策」が必要と判断された場合に、ISO 13849-1を適用し、図中のSRP/CSの反復プロセスを実施することとなります。なお、リスクアセスメントや3ステップメソッドについて詳しく知りたい方は以下からご覧いただけます。
ISO 13849-1では、SRP/CSがどれだけ信頼できるかをパフォーマンスレベル(Performance Level:PL)で評価します。PLは、単位時間当たりの危険側故障発生確率(Probability of a Dangerous Failure,PFHD)に基づいて、以下の5段階に分類されます。
表 PLとPFHD
| PL | 単位時間当たりの危険側故障発生確率(PFHD) 1/h |
|---|---|
| a(最低レベル) | 10-5 ≦ PFHD < 10-4 |
| b | 3 × 10-6 ≦ PFHD < 10-5 |
| c | 10-6 ≦ PFHD < 3 × 10-6 |
| d | 10-7 ≦ PFHD < 10-6 |
| e(最高レベル) | PFHD < 10-7 |
リスクアセスメントの結果に基づき、各安全機能に対して「どの程度の安全性が必要か」を定めたものが要求パフォーマンスレベル(required performance level, PLr)です。PLrは、機械の使用条件や危険の重大性、頻度などを考慮して決定されます。
PLを達成するには、以下の定量的側面と定性的側面に関連する要求事項を満足する必要があります。
設計したSRP/CSが、PLrを満たしているかどうかを評価するために、ISO 13849-1では設計検証と妥当性確認(ISO 13849-2)が求められます。
前述の通り、ISO 13849-1ではPL達成のために複数の要求事項を規定していますが、ここでは、そのなかのカテゴリについて紹介します。
ISO 13849-1では安全機能のシステムがカテゴリとして分類されます。これはSRP/CSの「構造」を示すもので、PL評価の基礎となります。カテゴリはシステムの冗長性や故障診断機能のレベルによって以下のように分類されており、Bから4にかけて数字が大きくなるほど故障への耐性が上がり、安全機能の信頼性が高くなります。
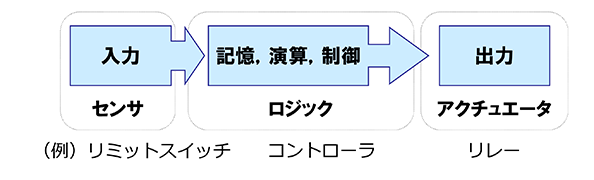 図 カテゴリB/カテゴリ1の論理的表現
図 カテゴリB/カテゴリ1の論理的表現
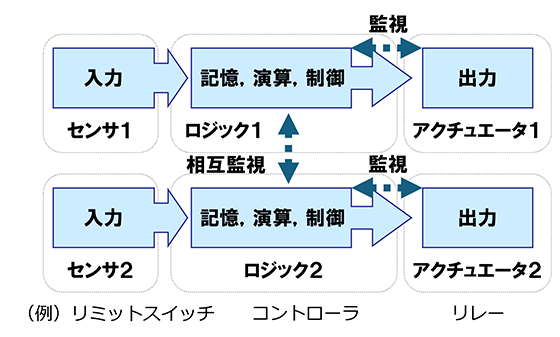 図 カテゴリ3の論理的表現
図 カテゴリ3の論理的表現
それでは、移動型ロボットを例に考えてみましょう。移動型ロボットは、公道やビルなど人と共存する環境での使用が想定されるため、周囲の人や障害物との危険な衝突を回避する機能が求められます。このような場合、安全機能の一例として以下のような衝突回避機能が考えられます。
図中では、最も基本的な構造であるカテゴリBによるSRP/CSの構成を例示しています。LiDARによる人や障害物の検出、セーフティコントローラによる停止の判断、FETによるモータの通電遮断によって安全機能が実現されています。ISO 13849-1ではこのカテゴリBを基本とし、より安全性の実績のある部品を使用することでカテゴリ1に、さらに故障診断機能を付加することでカテゴリ2に、といったような拡張が可能となります。
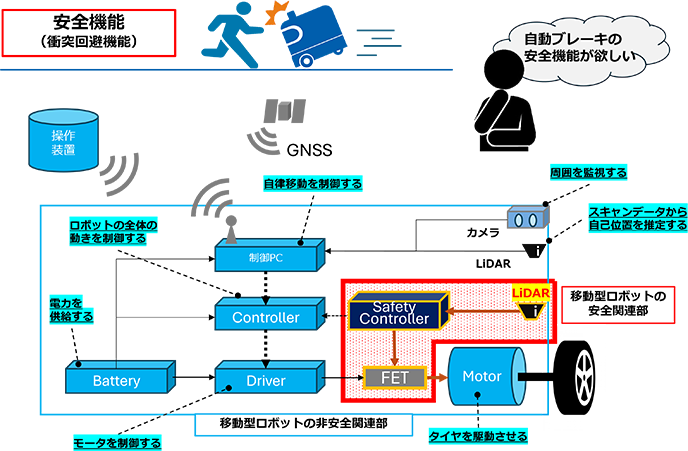
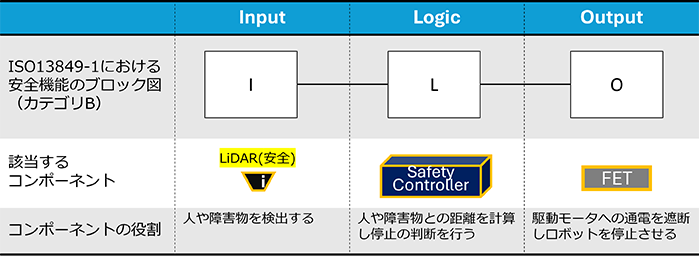 図 移動型ロボットとSRP/CS
図 移動型ロボットとSRP/CS
当機構では、サービスロボットの安全評価・認証や、さまざまな装置に搭載される機能安全の評価・認証をはじめ、規格解説セミナーや規格要求事項に基づいたテクニカルミーティングのサービスを行っています。